






Demonstration test of autonomous navigation system on large RORO cargo
Kawasaki Kisen Kaisha, Ltd. (“K” LINE) has been participated in the Joint Technological Development Program for the Demonstration test of Fully Autonomous Ships under the MEGURI 2040 Fully Autonomous Ship Project* (MEGURI2040) administrated by the Nippon Foundation.
In this time, we succeeded the sea demonstration test with PoC** stage of autonomous navigation system consisting of single function on board ship aiming to social implementation of fully autonomous ship, and we implemented on a round-trip route of approximately 1,600 km between Hitachi Port and Kushiro Port, which is the existing RORO cargo ship service route.
PoC overview
The autonomous navigation system was installed on the 11,413 gross-ton large RORO cargo ship “HOKUREN MARU No. 2” operated by KAWASAKI KINKAI KISEN KAISHA, Ltd.
Kawasaki Kinkai Kisen) for a total of 3 voyages starting on October 1, 2023***.
We confirmed that recognition, analysis, and decision making by the autonomous navigation system are executed with a high degree of accuracy in coastal navigation. In the experimental route, the autonomous navigation system was used to navigate while maintaining the normal crew navigation tasks, and in situations where avoidance was necessary, the autonomous navigation system proposed avoidance routes and controlled steering to safely avoid other vessels. The autonomous navigation system has achieved an average system operation rate of approximately 96% in the sea area set as ODD****.

Our approach in PoC
We led the implementation of the sea demonstration test for the retrofit of an onboard system, the autonomous navigation system (Target Detection, Planning, Actuation), which is being developed for social implementation in the second stage of MEGURI2040. During the test voyages, we provided expertise as maritime professionals.
In the future, we will utilize the data obtained from the sea demonstration tests to further enhance the autonomous navigation system, incorporating our expertise in safe operations, which is one of our strengths.
Our approach to 2025
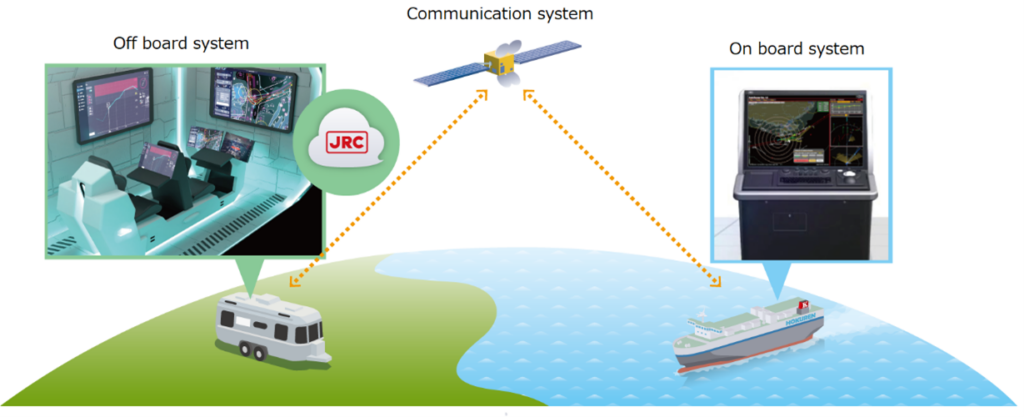
We will continue to collaborate with Japan Radio Co., Ltd., YDK Technologies Co., Ltd., and Kawasaki Kinkai Kisen to further develop a comprehensive system that contributes to the improvement of fully autonomous ships technology. We will continue to enhance the onboard system based on the research and development achievements thus far and develop an automatic vessel speed control system in preparation for the 2025 sea demonstration test. Our goal is to create an autonomous navigation system with high versatility that can be implemented in various types of vessels.
Furthermore, we will work on the development of off board system and ship-to-shore communication systems, aiming to establish continuous monitoring of vessel conditions from shore and provide navigational assistance. We will focus on the development and demonstration of ship-to-shore coordination technology.
* A subsidization scheme to cultivate further momentum for technological development in the field of fully autonomous ships, promoting changes in logistics, economies, and social infrastructure in Japan, and supporting such technological development through the success of the world’s first fully autonomous operation trials by domestic coastal vessels. We are participating as a member of the Designing the Future of Fully Autonomous Ships Plus consortium (DFFAS+).
** PoC(Proof of Concept):Verification process prior to prototype development
This is the sea demonstration test of the On board system only, and is one of the efforts toward the 2025 demonstration test of an Fully Autonomous Ship connected to shore-side-system.
*** Voyage 1 : October 1-3, 2023, Voyage 2 : October 9-11, 2023, Voyage 3 : October 17-19, 2023
**** ODD(Operational Design Domain):Operational design areas where autonomous navigation systems operate normally
Related Release
July 21, 2023: Participating in the Second Stage of the Nippon Foundation MEGURI2040 Fully Autonomous Ship Project for Social Implementation